大家好,又见面了,我是你们的朋友全栈君。
无刷直流电机在克服了有刷直流电机机械换相缺点的同时,又具有结构简单、运行可靠以及调速性能好等优点,在很多领域中得到了广泛的应用。
本次课题阐述了无刷直流电机的基本结构、运行原理和数学模型,并以无刷直流电机为被控对象,根据电机的特点和控制要求确定了三闭环控制策略,分别是位置、转速及电流环控制三者之间实行串级连接。采用模糊PID控制理论,搭建无刷直流电机和控制器的仿真模型来验证电机控制策略的可行性,使要能使伺服控制器的具体性能满足:无静差,响应快,超调量小的设计要求。结合三闭环控制结构的特点,在位置环中采用模糊PID控制算法,内环中的电流环和转速环均采用PI调节器,并根据方案进行伺服控制系统的仿真设计。
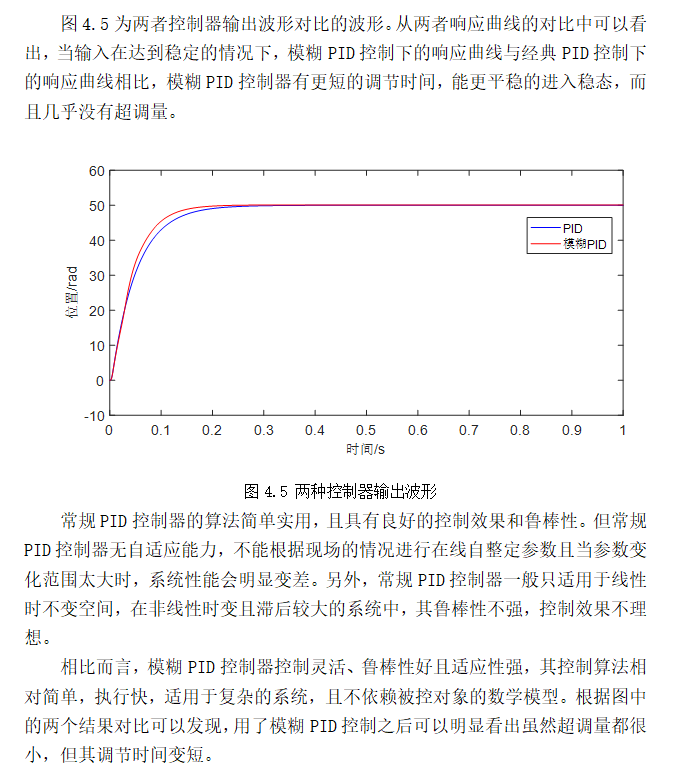
对所设计的仿真模型进行调试,通过仿真结果显示,在采用模糊PID控制器下,给定初始位移输入,控制系统的动态性能和静态性能都得到了很大改善,模糊PID控制下的响应曲线与经典PID控制下的响应曲线相比,具有较快的响应时间,曲线平稳,误差小。最后输出的转速维持在给定数值,上下浮动很小,并且保持输出转矩恒定,满足系统的指标。

其中,位置调节器采用模糊PID调节,图3.6为位置环的模型。相对于PID调节来说,模糊PID调节器具有更好的响应速度和消除静态误差。模糊模块的输入是转角位移的偏差和偏差变化量,输出是比例系数、积分系数和微分系数的变化增量,这三个增量在分别加上其各自的设定量,同时调节转角位移,可以保证在负载变化或外界环境变化下使系统具有更好的自调节能力。
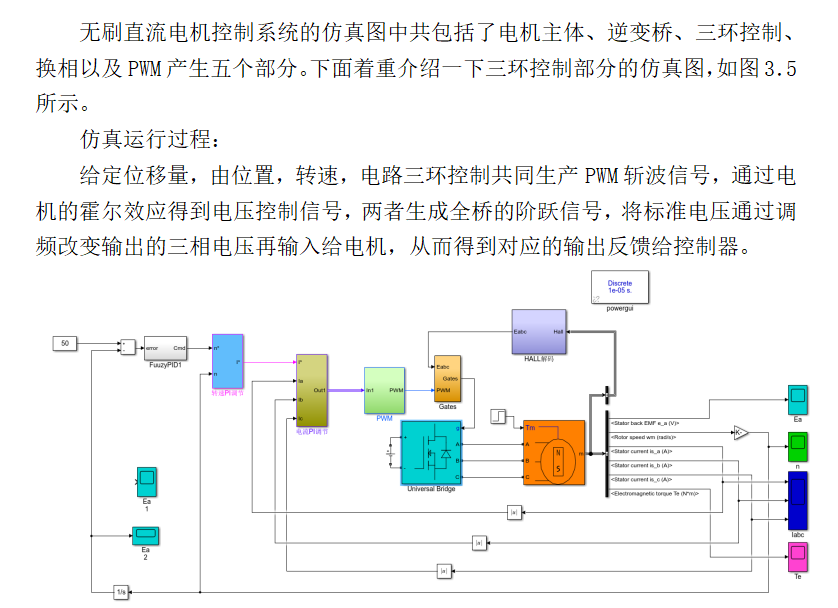
将前面设计好的模糊文件保存到MATLAB的工作区中,再将用Simulink库建好的仿真模型中的模糊控制器模块与工作区中的模糊推理系统fis结构连接起来,再设置输入输出向量个数,这样就建立了基于Matlab的无刷直流电机的模糊仿真模型。
本文以无刷直流电伺服控制系统为主题进行了分析与研究,尤其以三闭环控制策略以及模糊PID控制器的方案设计做了深入研究分析。主要做了两个方面的工作:
本文在第二三章详细分析无刷直流电机结构、工作原理,驱动方法以及数学模型的基础上,确定采用三相桥式全控驱动,并基于Simulink平台建立了其控制系统的仿真模型,设计了位置环的模糊PID调节器,以及转速环和电流环的PI调节器仿真模型,通过仿真结果分析验证了模糊PID的控制效果。
本文在第四章通过与传统PID控制方案的对比,进一步证实模糊PID在响应时间,误差和超调量上的优良之处。
总体来说,本文将模糊PID与三闭环控制策略运用到无刷直流电机控制系统中,提高了其动态及静态性能。但由于本人能力上的不足,以及时间限制,虽然提出了模糊PID控制思想,但是其控制系统较实际应用还有其不足之处,参数的设置还需进行进一步精确调整。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/128357.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
