大家好,又见面了,我是你们的朋友全栈君。
文章目录
四旋翼飞行器3——四旋翼运动学简介
四旋翼飞行器是通过调整四个电机的转速来保证其飞行的。每个电机旋转,产生推力向上。
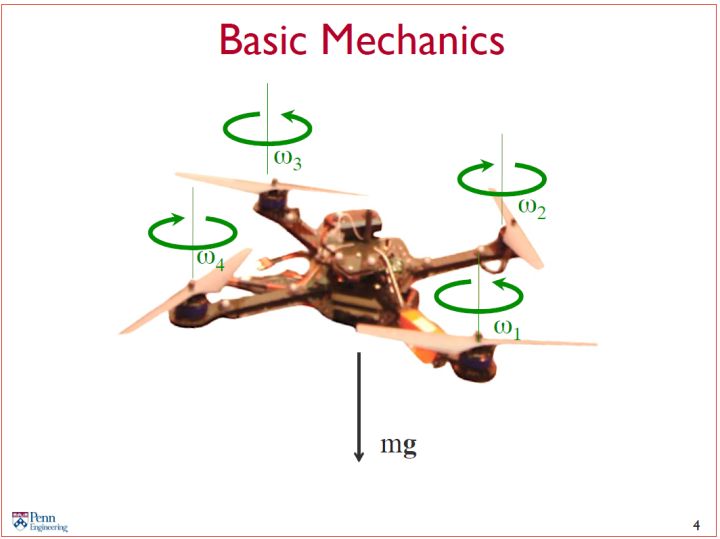

而推力与电机转速成二次方关系。电机旋转也会产生一个转矩,其与电机转速也成二次方关系,如下图蓝色和橙色的曲线显示。
如果是四旋翼,则每个电机负担四分之一重量来保持悬停,根据下图,为了满足推力抵消四分之一的重量,就能确定电机的转速值,如图中的w0,即悬停转速值。这个转速同时也会产生一个电机转矩,每个电机需要克服这个转矩,选取合适的电机就是根据这个来定的,电机产生的力矩要能抵消这个转矩。
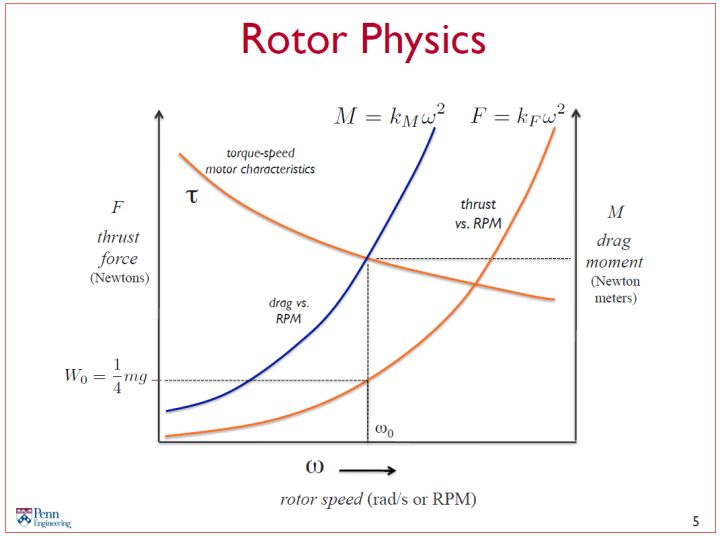
悬停时,电机的转速产生的推力能够补偿机身的重力。通过这个重量,就能确定每个电机的悬停转速值,也能够得到每个电机所需的力矩。
如果知道KF和KM系数值,很容易得到合力F,如图所示。
同样的,如果能够知道飞行器的重心位置,飞行器的总力矩M也可以计算出来,包括每个电机产生的推力得到的力矩和顺时针或逆时针旋转产生的力矩(与yaw运动有关)。
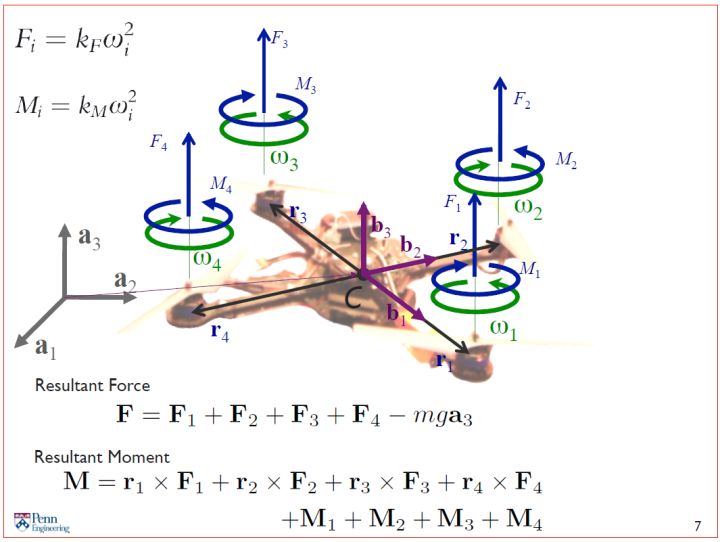
悬停状态下,合力F和总力矩M都为零。
但是如果合力F或力矩M不为0时,就会产生加速度。
以高度方向为例,
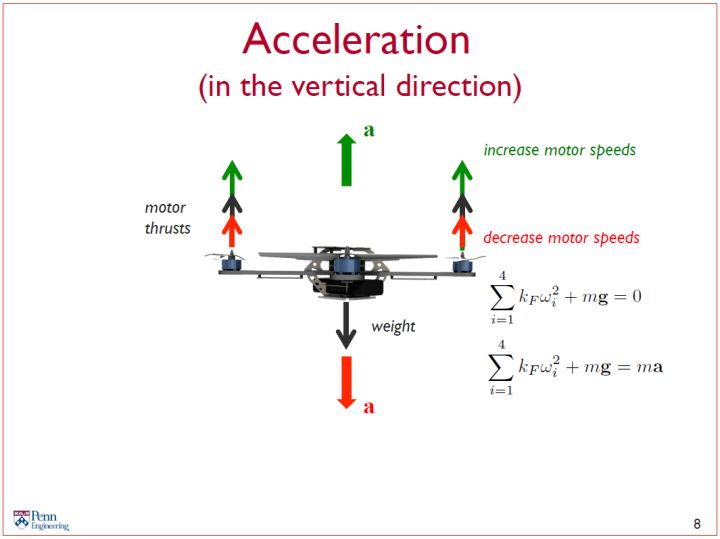
增大电机转速,就会产生向上的加速度,反之同理。
参考博客:
下面这篇文章讲的真是详细和优秀。
1、Robotics Aerial Robotics课程专题 第二讲 四旋翼动力学和系统设计
https://www.aiimooc.com/article/show-htm-itemid-109.html 写论文时可以参考。
2、玩转四旋翼无人机(四旋翼运动学简介)
https://blog.csdn.net/wendox/article/details/52439564
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/127032.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
