大家好,又见面了,我是你们的朋友全栈君。
四轴飞行器是一个在空间具有6个活动自由度(分别沿3个坐标轴作平移和旋转动作),但是只有4个控制自由度(四个电机的转速)的系统,因此被称为欠驱动系统(只有当控制自由度等于活动自由度的时候才是完整驱动系统)
四旋翼飞行器的结构
可大致分为两种结构形式:
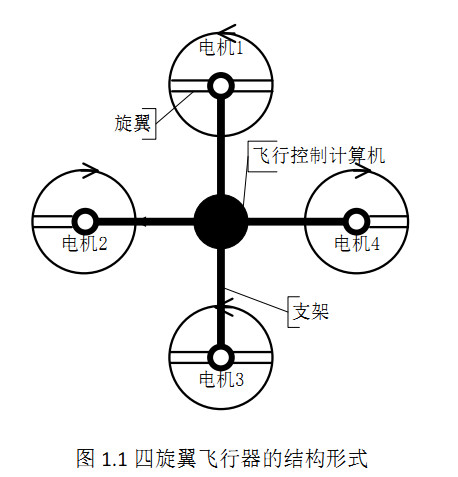
“十字形”结构
该种结构四个旋翼对称分布在机体的前后、左右方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备,
这种结构特点:同一直线上转向相同,不同直线上转向相反。该结构控制简单,但是灵活性较差。

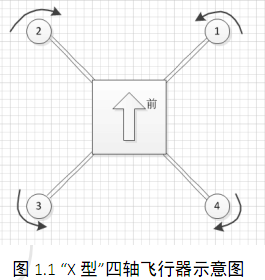
“X字形”结构

控制原理:
为了保持飞行器的稳定飞行,在四轴飞行器上装有3个方向的陀螺仪和3 轴加速度传感器组成惯性导航模块,可以计算出飞行器此时相对地面的姿态以及加速度、角速度。飞行控制器通过算法计算保持运动状态时所需的旋转力和升力,通过电子调控器来保证电机输出合适的力。通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
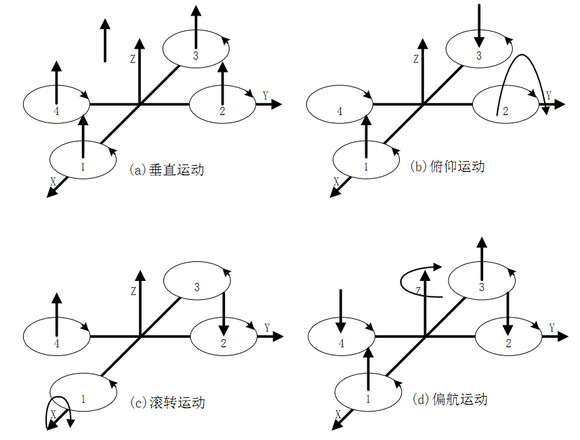
四旋翼飞行器的电机 1和电机 3逆时针旋转的同时,电机 2和电机 4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机 1和电机 3作逆时针旋转,电机 2和电机 4作顺时针旋转,规定沿 x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:
同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿 z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:
在图(b)中,电机 1的转速上升,电机 3 的转速下降(改变量大小应相等),电机 2、电机 4 的转速保持不变。由于旋翼1 的升力上升,旋翼 3 的升力下降,产生的不平衡力矩使机身绕 y 轴旋转,同理,当电机 1 的转速下降,电机 3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:
与图 b 的原理相同,在图 c 中,改变电机 2和电机 4的转速,保持电机1和电机 3的转速不变,则可使机身绕 x 轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:
旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图 d中,当电机 1和电机 3 的转速上升,电机 2 和电机 4 的转速下降时,旋翼 1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕 z轴转动,实现飞行器的偏航运动,转向与电机 1、电机3的转向相反。
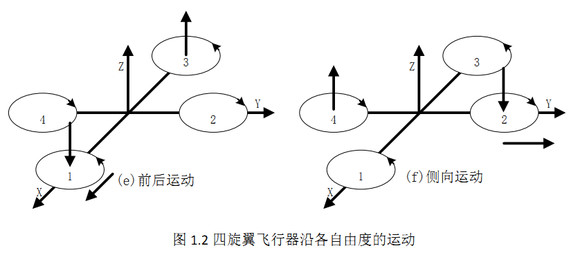
(5)前后运动:
要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图 e中,增加电机 3转速,使拉力增大,相应减小电机 1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图 b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。(在图 b 图 c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿 x、y轴的水平运动。)
(6)倾向运动(左右运行):
在图 f 中,由于结构对称,所以倾向飞行的工作原理与前后运动完全一样。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/126807.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...