
大家好,又见面了,我是你们的朋友全栈君。
分束器的经典描述
光学中分束器 (beam splitter) 如图所示.
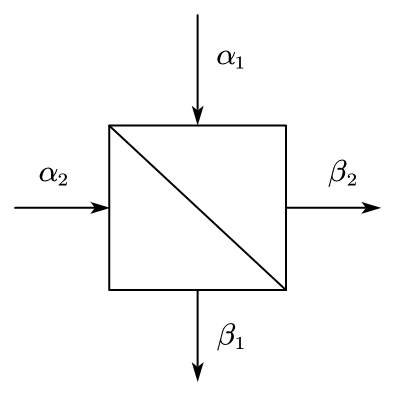
输入电场和输出电场以\(\alpha_i,\beta_j\)标记。只考虑单输入\(\alpha_1\),则输出可以写为
\[ \beta_1=\sqrt{1-R}\alpha_1\text{e}^{i\phi_{1,T}} \]
\[ \beta_2=\sqrt{R}\alpha_1\text{e}^{i\phi_{1,R}} \]
其中\(R\)是能量反射系数,于是能量守恒:\(|\alpha_1|^2=|\beta_1|^2+|\beta_2|^2\).
现在考虑两路输入,于是输入输出可以整合为一个矩阵关系
\[ \begin{pmatrix} \beta_1\\\beta_2 \end{pmatrix}= \begin{pmatrix} \sqrt{1-R}\text{e}^{i\phi_{1,T}}&\sqrt{R}\text{e}^{i\phi_{2,R}}\\ \sqrt{R}\text{e}^{i\phi_{1,R}}&\sqrt{1-R}\text{e}^{i\phi_{2,T}} \end{pmatrix} \begin{pmatrix} \alpha_1\\\alpha_2 \end{pmatrix} \]
能量守恒要求\(|\alpha_1|^2+|\alpha_2|^2=|\beta_1|^2+|\beta_2|^2\),就是要求
\[ \text{e}^{i(\phi_{2,R}-\phi_{1,T})}+\text{e}^{\phi_{2,T}-\phi_{1,R}}=0 \]
只要不违背上面方程,四个相位可以随意选取。如果选择\(\phi_{2,t}=\pi\)而其他三个相位为零,则变换矩阵为
\[ \begin{pmatrix} \sqrt{1-R}&\sqrt{R}\\\sqrt{R}&-\sqrt{1-R} \end{pmatrix} \]
如果选取\(\phi_{1,R}=\phi_{2,R}=\pi/2\),其他两个相位为零,则变换矩阵为
\[ \begin{pmatrix} \sqrt{1-R}&i\sqrt{R}\\i\sqrt{R}&\sqrt{1-R} \end{pmatrix} \]
对50:50分束器有\(R=1/2\).
分束器的量子力学描述
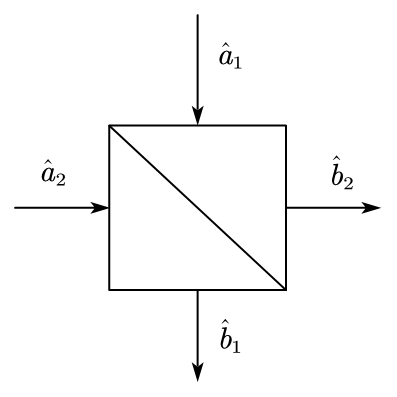
输入输出的关系是线性的,可以写为
\[ \begin{pmatrix} \hat{b}_1\\\hat{b}_2 \end{pmatrix}= \begin{pmatrix} t’&r\\r’&t \end{pmatrix} \begin{pmatrix} \hat{a}_1\\\hat{a}_2 \end{pmatrix} \]
展开上式就知道命名为\(t,r\)的意义:分别代表透射和反射。
如果要求新的 \(\hat{b}_i^{(\dagger)}\) 满足玻色子对易关系,则可推得变换矩阵必须是幺正矩阵,即必须满足
\[ \left\{ \begin{aligned} &|t’|^2+|r|^2=1\\ &|r’|^2+|t|^2=1\\ &t’r’^*+rt^*=0 \end{aligned} \right. \Rightarrow \left\{ \begin{aligned} &|r’|=|r|\\ &|t’|=|t|\\ &|r|^2+|t|^2=1\\ &r^*t’+r’t^*=0\\ &r^*t+r’t’^*=0 \end{aligned} \right. \]
上面第二个式子是第一个式子的改写。对于50:50分束器,有\(|r|=|t|\),可以选择写为
\[ \begin{pmatrix} \hat{b}_1\\\hat{b}_2 \end{pmatrix}=\frac{1}{\sqrt{2}} \begin{pmatrix} 1&i\\i&1 \end{pmatrix} \begin{pmatrix} \hat{a}_1\\\hat{a}_2 \end{pmatrix} \]
该关系还可以写为
\[ \begin{pmatrix} \hat{b}_1\\\hat{b}_2 \end{pmatrix}=\hat{U} \begin{pmatrix} \hat{a}_1\\\hat{a}_2 \end{pmatrix}\hat{U}^\dagger \]
其中的
\[ \hat{U}=\exp[-i\frac{\pi}{4}(\hat{a}_1^\dagger\hat{a}_2+\hat{a}_1\hat{a}_2^\dagger)] \]
通过使用Baker-Hausdoff公式展开,可验证之。
现在主要问题是:入射态为\(|\psi\rangle_{a1}|\phi\rangle_{a2}\),求经过分束器后\(\hat{b}_1\)端口的某可观测算符的期望。有两个办法可以计算。
第一个办法是把\(\hat{b}_1\)端口的算符通过输入输出算符之间的变换关系,展开到\(a\)这边来,然后在入射态\(|\psi\rangle_{a1}|\phi\rangle_{a2}\)下求期望即可。
第二个办法是,我们有了场算符的变换关系,先写 (这里写的是直积态,但显然不局限于直积态)
\[ |\psi\rangle_{a1}|\phi\rangle_{a2}=f_{a1}(\hat{a}_1^\dagger)f_{a2}(\hat{a}_2^\dagger)|0,0\rangle \]
经过分束器变换后,代入上面的变换关系,场算符从\(a\)换成了\(b\),于是入射态可以写为
\[ |\psi’\rangle_{b1}|\phi’\rangle_{b2}=f_{a1}(\hat{b}_1^\dagger,\hat{b}_2^\dagger)f_{a2}(\hat{b}_1^\dagger,\hat{b}_2^\dagger)|0,0\rangle \]
从而端口\(\hat{b}_1\)的可观测量\(\hat{g}(\hat{b}_1,\hat{b}_1^\dagger)\)的期望可以写为
\[ \langle\hat{g}\rangle=\langle0,0|f^\dagger_{a2}(\hat{b}_1^\dagger,\hat{b}_2^\dagger)f^\dagger_{a1}(\hat{b}_1^\dagger,\hat{b}_2^\dagger)\hat{g}(\hat{b}_1,\hat{b}_1^\dagger)f_{a1}(\hat{b}_1^\dagger,\hat{b}_2^\dagger)f_{a2}(\hat{b}_1^\dagger,\hat{b}_2^\dagger)|0,0\rangle \]
注意在第二个办法中,我们认为真空态就是真空态,在\(a\)这边和在\(b\)这边都是同一个真空态。
利用变换关系的算符形式\(\hat{b}_i=\hat{U}^\dagger\hat{a}_i\hat{U}\),对\(|\psi\rangle_{a1}|\phi\rangle_{a2}=f_{a1}(\hat{a}_1^\dagger)f_{a2}(\hat{a}_2^\dagger)|0,0\rangle\)两边从左边乘以\(\hat{U}^\dagger\),并在\(|0,0\rangle\)前面插入一个\(\hat{U}\hat{U^\dagger}\),利用\(\hat{U}^\dagger|0,0\rangle=|0,0\rangle\)并对比\(|\psi’\rangle_{b1}|\phi’\rangle_{b2}=f_{a1}(\hat{b}_1^\dagger,\hat{b}_2^\dagger)f_{a2}(\hat{b}_1^\dagger,\hat{b}_2^\dagger)|0,0\rangle\)的右端可得
\[ \hat{U}^\dagger|\psi\rangle_{a1}|\phi\rangle_{a2}=|\psi’\rangle_{b1}|\phi’\rangle_{b2} \]
即入射态在\(a\)这边到\(b\)这边的表达式,可以通过\(\hat{U}^\dagger\)来转换。于是,从入射端到出射端,我们可以选择变场算符而态不变,也可以选择变态而场算符不变。这完全类似于海森伯绘景和薛定谔绘景的对比。
分束器描述和角动量算符的关系
上面已经给出,对于一个50:50分束器,其场算符之间的变换可以选为
\[ \begin{pmatrix} \hat{b}_1\\\hat{b}_2 \end{pmatrix}=\frac{1}{\sqrt{2}} \begin{pmatrix} 1&i\\i&1 \end{pmatrix} \begin{pmatrix} \hat{a}_1\\\hat{a}_2 \end{pmatrix} \]
而该选择对应的变换算符为
\[ \hat{U}=\exp[-i\frac{\pi}{4}(\hat{a}_1^\dagger\hat{a}_2+\hat{a}_1\hat{a}_2^\dagger)] \]
现在关注的问题是:一般分束器的场算符之间的一般变换关系(矩阵形式)和变换算符\(\hat{U}\)之间有着怎样的普遍对应关系。
习惯把变换矩阵写为
\[ \begin{pmatrix} \hat{b}_1\\\hat{b}_2 \end{pmatrix}= \begin{pmatrix} B_{11}&B_{12}\\B_{21}&B_{22} \end{pmatrix} \begin{pmatrix} \hat{a}_1\\\hat{a}_2 \end{pmatrix} \]
而幺正性要求为
\[ \left\{ \begin{aligned} &|B_{11}|^2+|B_{12}|^2=1\\ &|B_{21}|^2+|B_{22}|^2=1\\ &B_{11}B_{21}^*+B_{12}B_{22}^*=0 \end{aligned} \right. \]
对上面最后一个式子两边取模得到\(|B_{11}||B_{21}|=|B_{12}||B_{22}|\),于是\(|B_{11}|^2=|B_{22}|^2\), \(|B_{12}|^2=|B_{21}|^2\). 于是可以等价地改写为
\[ \begin{aligned} |B_{11}|^2=|B_{22}|^2=T=\cos^2\theta\\ |B_{12}|^2=|B_{21}|^2=R=\sin^2\theta \end{aligned} \]
其中参量\(0\leqslant\theta\leqslant\pi/2\). 对幺正性条件的最后一式取辐角,可得\(\phi_{11}-\phi_{12}=\phi_{21}-\phi_{22}\pm\pi\),于是定义新的三个角为
\[ \begin{aligned} \phi_T&=\frac{1}{2}(\phi_{11}-\phi_{22})\\ \phi_R&=\frac{1}{2}(\phi_{12}-\phi_{21}\mp\pi)\\ \phi_0&=\phi_{11}+\phi_{22} \end{aligned} \]
经过参量\(\theta\)和三个新角度的改写,变换矩阵\(B\)为
\[ B=\text{e}^{i\phi_0}\begin{pmatrix} \cos\theta\text{e}^{i\phi_T}&\sin\theta\text{e}^{i\phi_R}\\ -\sin\theta\text{e}^{-i\phi_R}&\cos\theta\text{e}^{-i\phi_T} \end{pmatrix} \]
考虑到物理意义,\(\phi_0\)是一个全局相位,可以设为零,而\(\phi_T\)和\(\phi_R\)就是透射路和反射路的附加相移。例如,如果附加相移都为零,则
\[ B=\begin{pmatrix} \cos\theta&\sin\theta\\ -\sin\theta&\cos\theta \end{pmatrix} \]
现在引入Schwinger关系
\[ \begin{aligned} \hat{L}_1&=\frac{1}{2}(\hat{a}_1^\dagger\hat{a}_2+\hat{a}_2^\dagger\hat{a}_1)\\ \hat{L}_2&=\frac{1}{2i}(\hat{a}_1^\dagger\hat{a}_2-\hat{a}_2^\dagger\hat{a}_1)\\ \hat{L}_3&=\frac{1}{2}(\hat{a}_1^\dagger\hat{a}_1-\hat{a}_2^\dagger\hat{a}_2)\\ \end{aligned} \]
于是可以验证它们满足角动量对易关系\([\hat{L}_i,\hat{L}_j]=i\epsilon_{ijk}\hat{L}_k\),只不过相较通常的角动量算符,这里重新归一化到了\(\hbar\)而已。所以通过Schwinger关系,两个玻色子模式的产生消灭算符可以和一组角动量算符相互联系。现在考察该组角动量算符经受旋转变换(SO(3)群),即\(\hat{L}_j’=\hat{B}(\Phi,\Theta,\Psi)\hat{L}_j\hat{B}^\dagger(\Phi,\Theta,\Psi)\). (注意区分矩阵\(B\)和算符\(\hat{B}\)) 对于新的加了一撇的角动量算符,仍然有两个模式的产生湮灭算符\(\hat{b}_1^{(\dagger)},\hat{b}^{(\dagger)}_2\)与之有Schwinger关系,并且反解可得
\[ \hat{b}_i=\hat{B}(\Phi,\Theta,\Psi)\hat{a}_i\hat{B}^\dagger(\Phi,\Theta,\Psi) \]
按照群论的惯常用法,算符\(\hat{B}(\Phi,\Theta,\Psi)\)可以写为 (即,先绕老\(z\)轴\(\Psi\)角,再绕新\(y\)轴\(\Theta\)角,最后绕新\(z\)轴\(\Phi\)角可以绕到任何空间取向)
\[ \hat{B}(\Phi,\Theta,\Psi)=\text{e}^{-i\Phi\hat{L}_3}\text{e}^{-i\Theta\hat{L}_2}\text{e}^{-i\Psi\hat{L}_3} \]
为了得到\(\hat{B}\)作用在\(\hat{a}_i\)两边后的结果,我们首先看\(\hat{B}\)作用到角动量算符上的结果,再根据Schwinger关系反推。而\(\hat{B}\)作用到角动量算符上的结果为
\[ \text{e}^{-i\Theta\hat{L}_2}\begin{pmatrix} \hat{L}_1\\ \hat{L}_2\\ \hat{L}_3 \end{pmatrix}\text{e}^{i\Theta\hat{L_2}}= \begin{pmatrix} \cos\Theta&0&-\sin\Theta\\ 0&1&0\\ \sin\Theta&0&\cos\Theta \end{pmatrix} \begin{pmatrix} \hat{L}_1\\ \hat{L}_2\\ \hat{L}_3 \end{pmatrix} \]
- \[ \text{e}^{-i\Phi\hat{L}_3}\begin{pmatrix}\hat{L}_1\\ \hat{L}_2\\ \hat{L}_3\end{pmatrix}\text{e}^{i\Phi\hat{L}_3}=\begin{pmatrix}\cos\Phi&\sin\Phi&0\\-\sin\Phi&\cos\Phi&0\\0&0&1\end{pmatrix}\begin{pmatrix}\hat{L}_1\\ \hat{L}_2\\ \hat{L}_3\end{pmatrix} \]
上面两个式子可以直接如下得到。首先已知SO(3)群元对空间三维矢量的变换矩阵,但是这里是对算符的变换。对角动量算符沿\(z\)轴转\(\alpha\)角,可以理解为对研究的三维矢量沿\(z\)转动\(-\alpha\)角。于是通常的SO(3)群的变换矩阵,对所有角度加负号,就是这里对角动量算符的变换矩阵。这里,把\(3\times3\)的代表\(\hat{B}(\Phi,\Theta,\Psi)\)作用效果的矩阵记为\(A(\Phi,\Theta,\Psi)\).
根据上式,以及Schwinger关系,可以反推出
\[ \text{e}^{-i\Theta\hat{L}_2} \begin{pmatrix} \hat{a}_1\\ \hat{a}_2 \end{pmatrix} \text{e}^{i\Theta\hat{L_2}}= \begin{pmatrix} \cos\Theta&\sin\Theta\\ -\sin\Theta&\cos\Theta \end{pmatrix} \begin{pmatrix} \hat{a}_1\\ \hat{a}_2 \end{pmatrix} \]
- \[ \text{e}^{-i\Phi\hat{L}_3} \begin{pmatrix} \hat{a}_1\\ \hat{a}_2 \end{pmatrix} \text{e}^{i\Phi\hat{L}_3}= \begin{pmatrix} \text{e}^{i\Phi/2}&0\\ 0&\text{e}^{-i\Phi/2} \end{pmatrix} \begin{pmatrix} \hat{a}_1\\ \hat{a}_2 \end{pmatrix} \]
从而矩阵\(B\)为
\[ \begin{aligned} B(\Phi,\Theta,\Psi)&= \begin{pmatrix} \text{e}^{i\Psi/2}&0\\ 0&\text{e}^{-i\Psi/2} \end{pmatrix} \begin{pmatrix} \cos\Theta&\sin\Theta\\ -\sin\Theta&\cos\Theta \end{pmatrix} \begin{pmatrix} \text{e}^{i\Phi/2}&0\\ 0&\text{e}^{-i\Phi/2} \end{pmatrix} \\&= \begin{pmatrix} \cos\Theta\text{e}^{i(\Psi+\Phi)/2}&\sin\Theta\text{e}^{i(\Psi-\Phi)/2}\\ -\sin\Theta\text{e}^{-i(\Psi-\Phi)/2}&\cos\Theta\text{e}^{-i(\Psi+\Phi)/2} \end{pmatrix} \end{aligned} \]
注意上式最后的矩阵就是和\(A(\Phi,\Theta,\Psi)\)同态的\(\text{SU(2)}\)的群元,它可以代表任意的\(2\times2\)的幺正矩阵。
于是现在我们手里有了\(B\)矩阵的两种形式,一种是开头得到的使用参量\(\theta\)和两个角度表达形式(本来是三个角度,但\(\phi_0\)全局相位可剔除,从而行列式就为1,从而由\(\text{U}(2)\)变为\(\text{SU(2)}\)),另一种是这里的\(\text{SU(2)}\)的一般形式。这两种形式都含三个参数,参数之间的对应关系为
\[ \begin{aligned} \theta&=\frac{1}{2}\Theta\\ \phi_T&=\frac{1}{2}(\Psi+\Phi)\\ \phi_R&=\frac{1}{2}(\Psi-\Phi) \end{aligned} \]
Reference:
[1]. Introductory Quantum Optics. Gerry and Knight (2004).
[2]. Phys. Rev. A, 40, 1371 (1989).
转载于:https://www.cnblogs.com/immcrr/p/10978326.html
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/106786.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...